Abstract
The system development process started with inspiration from the natural world. Slime mold – a single cellular organism renowned for its ability to find the most optimal route to find the source of food was an initial driver of the design. During the development of the project initial ideas shifted towards a wooden, modular system which could be assembled and disassembled with ease. Timber planks of the same size would allow anyone to use and build the system.
3D model
The 3D model uploaded using threejs with data assigned for each element. To highlight data click on different parts of the model below.
Inspiration
Design initial inspiration came from slime mold.
“Slime molds are among the world’s strangest organisms. Long mistaken for fungi, they are now classed as a type of amoeba. As single-celled organisms, they have neither neurons nor brains. Yet for about a decade, scientists have debated whether slime molds have the capacity to learn about their environments and adjust their behavior accordingly.”
@Katia Moskwitch, quantamagazine
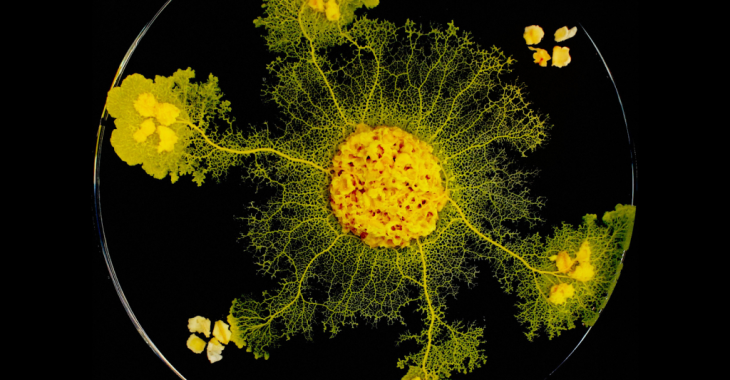
Slime mold by @Audrey Dussutour, CNRS
Initial form finding and exploration
Grasshopper form finding experiments.
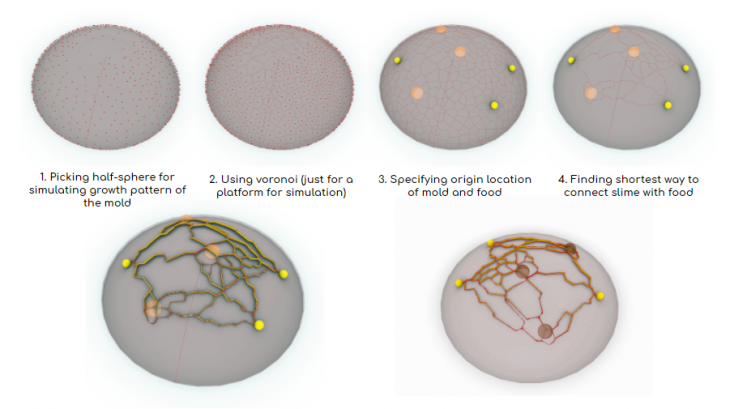
Slime mold behaviour recreated in grasshopper
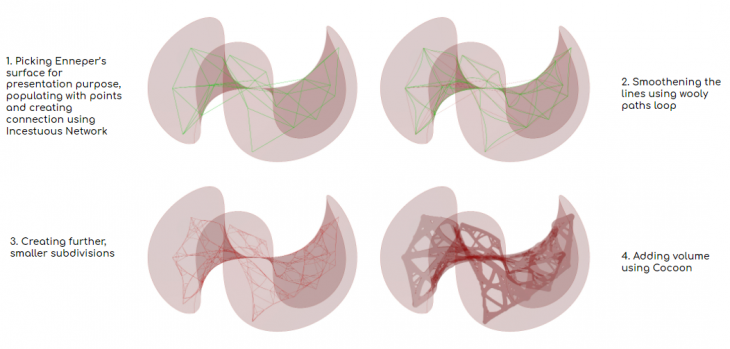
Algorithm applied to Ennepers surface
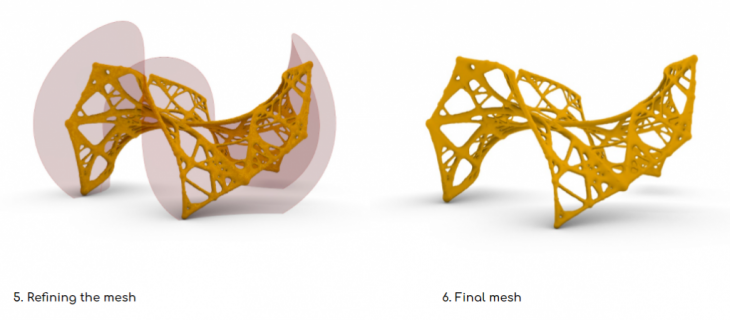
Volumetric shape achieved by using Cocoon
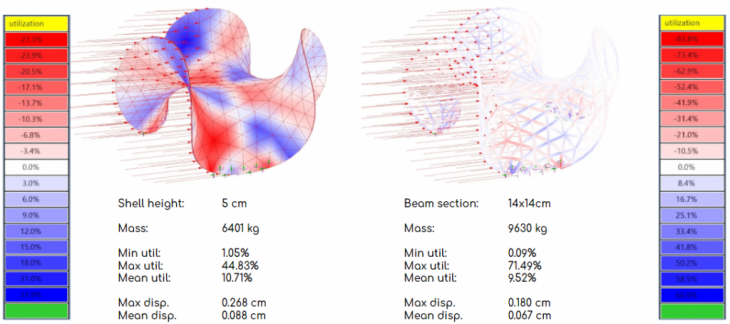
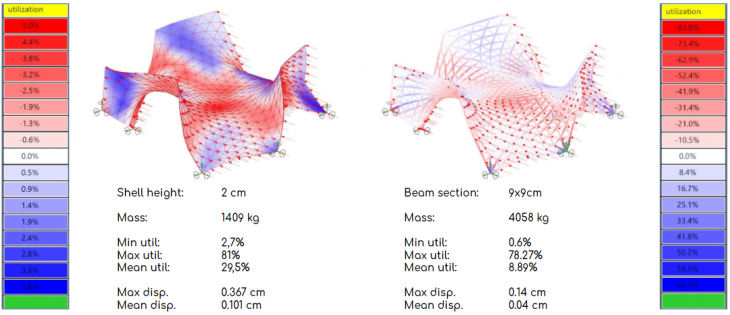
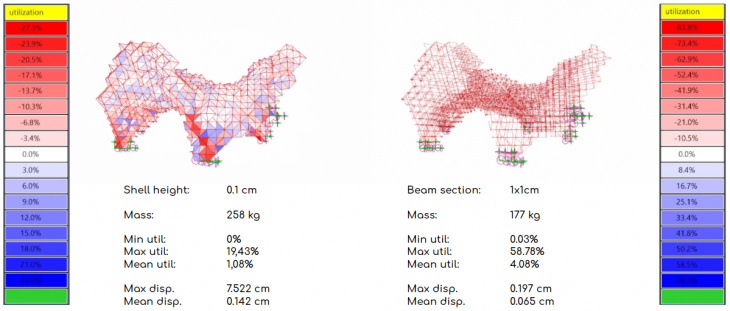
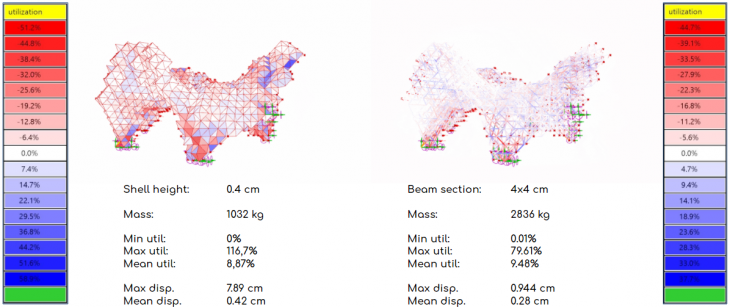
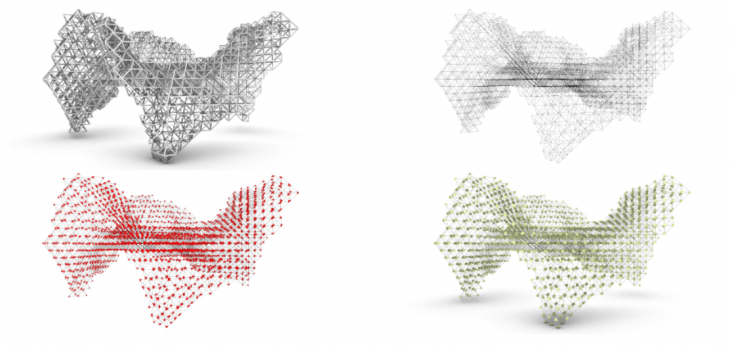
Structural analysis
Using KARAMBA 3d to get the better understanding of factors effecting structural performance.

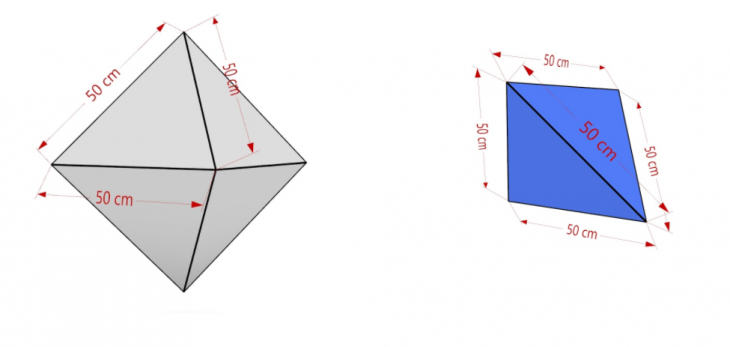

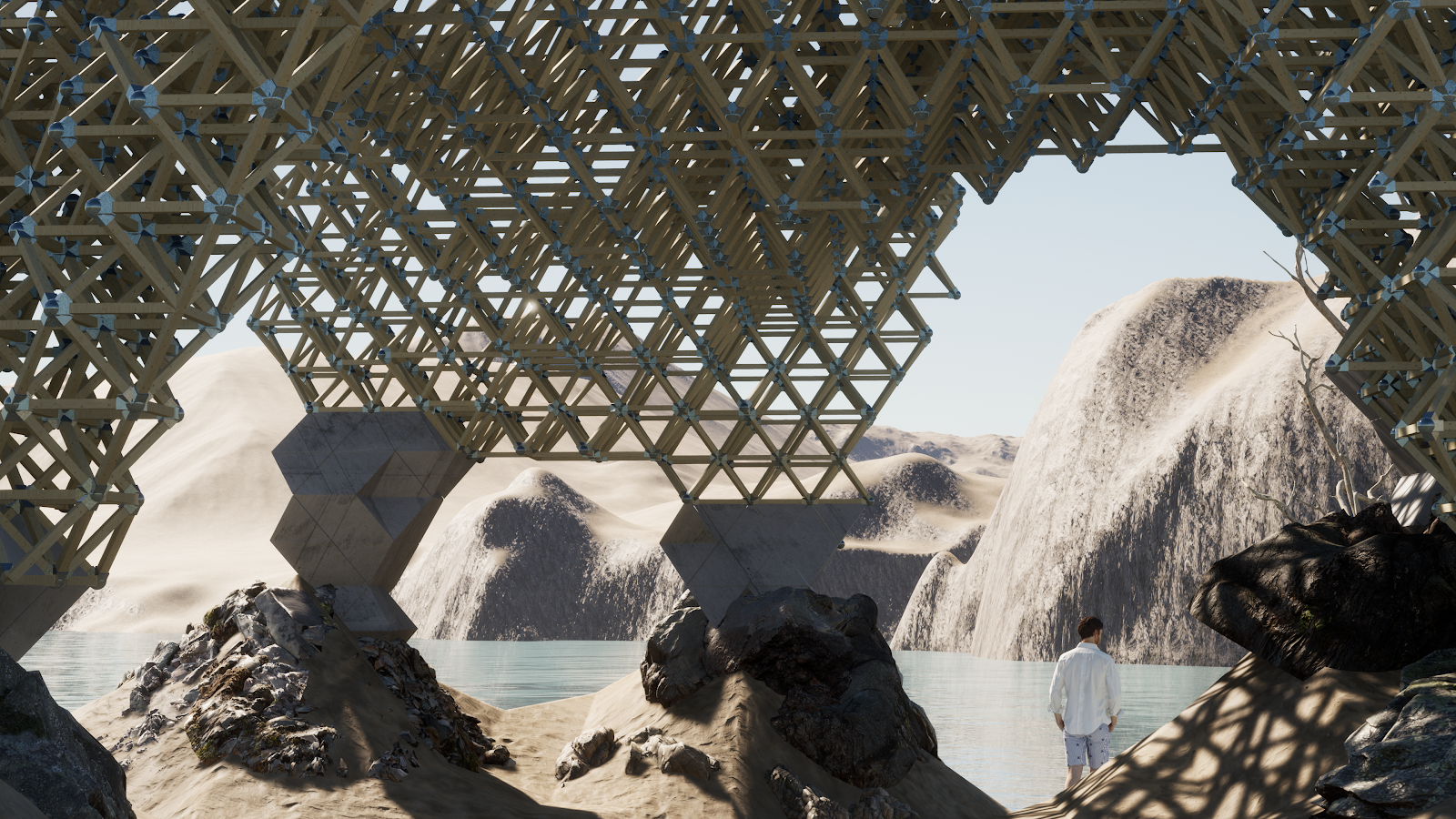
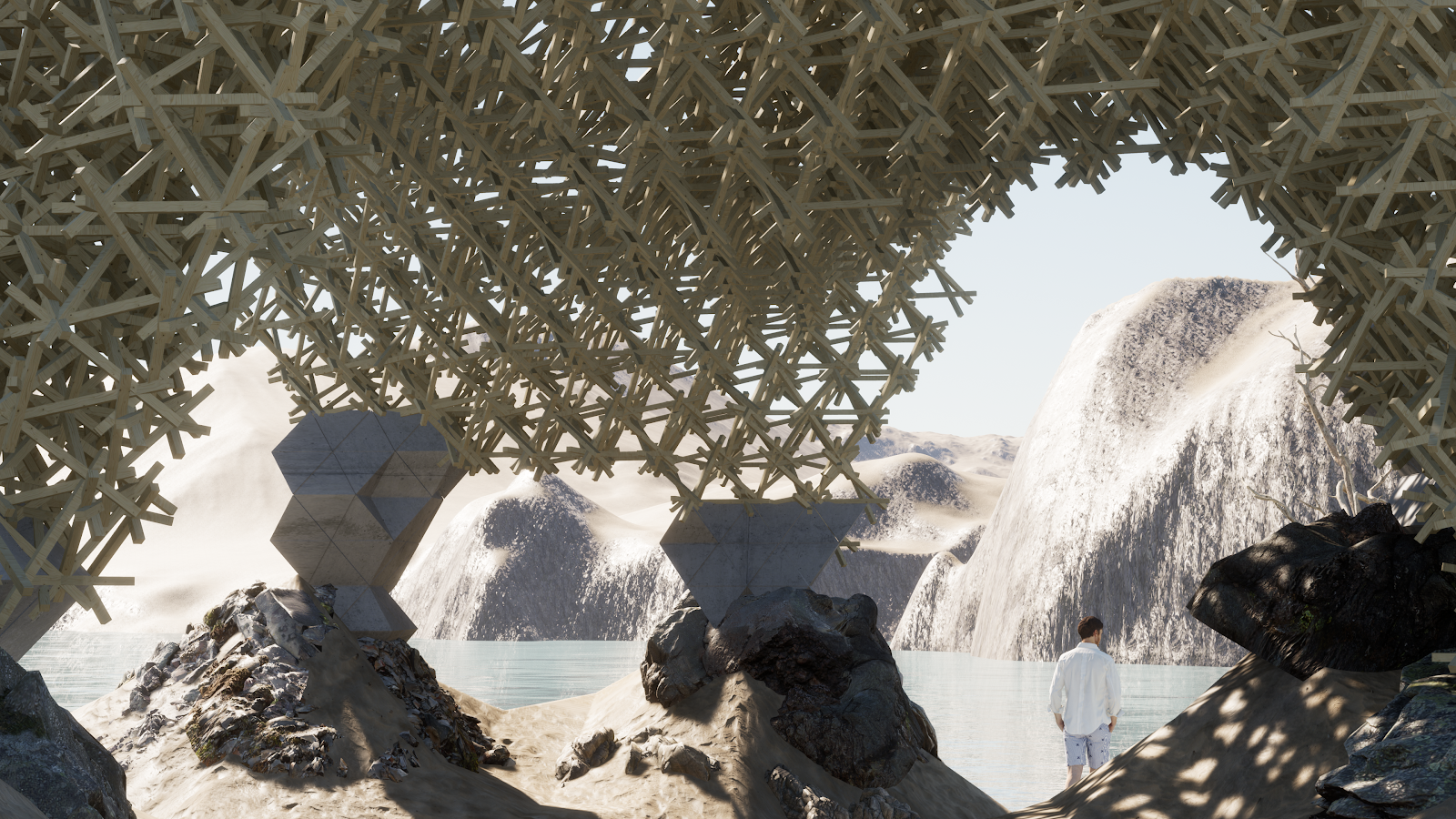
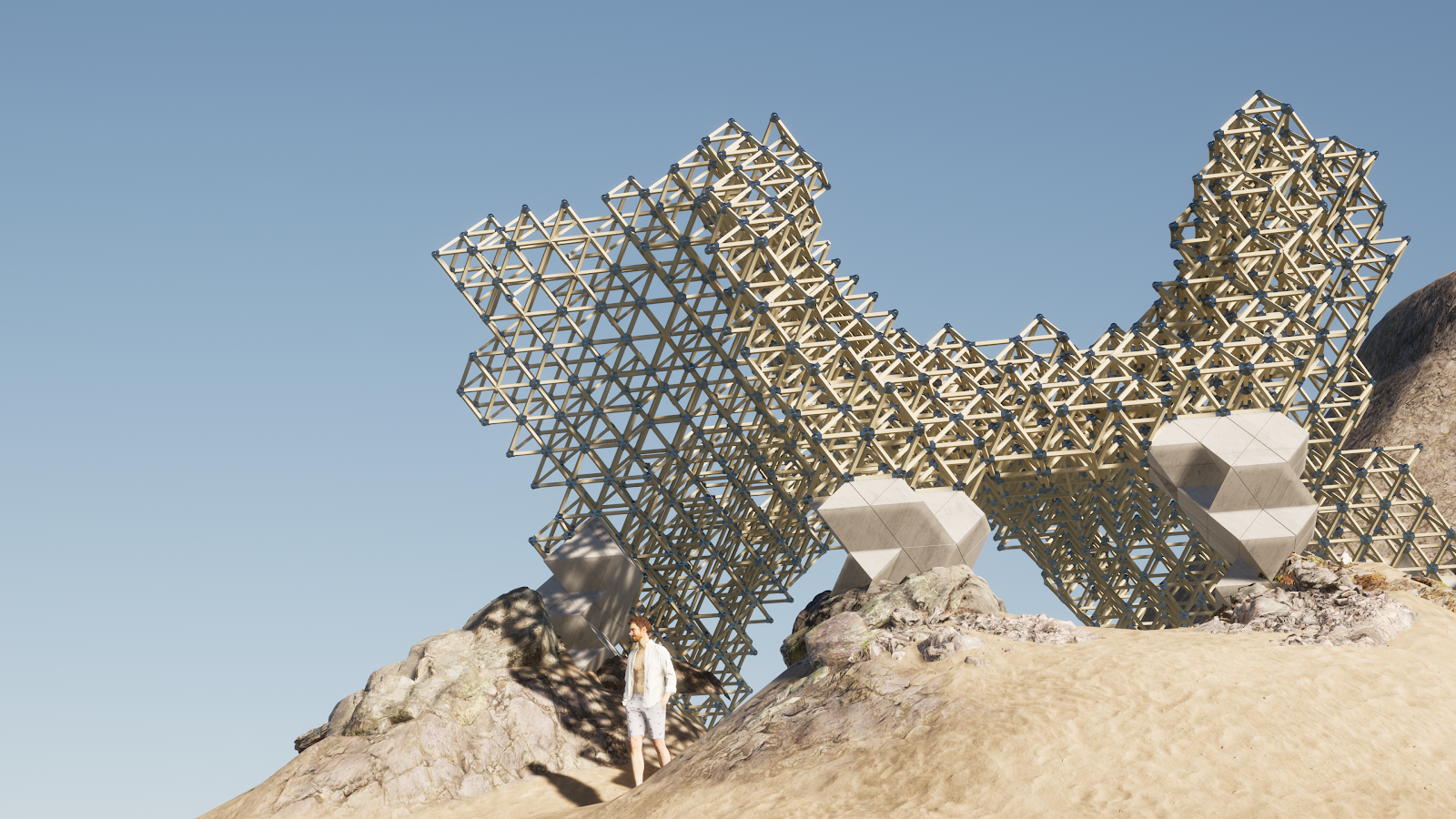
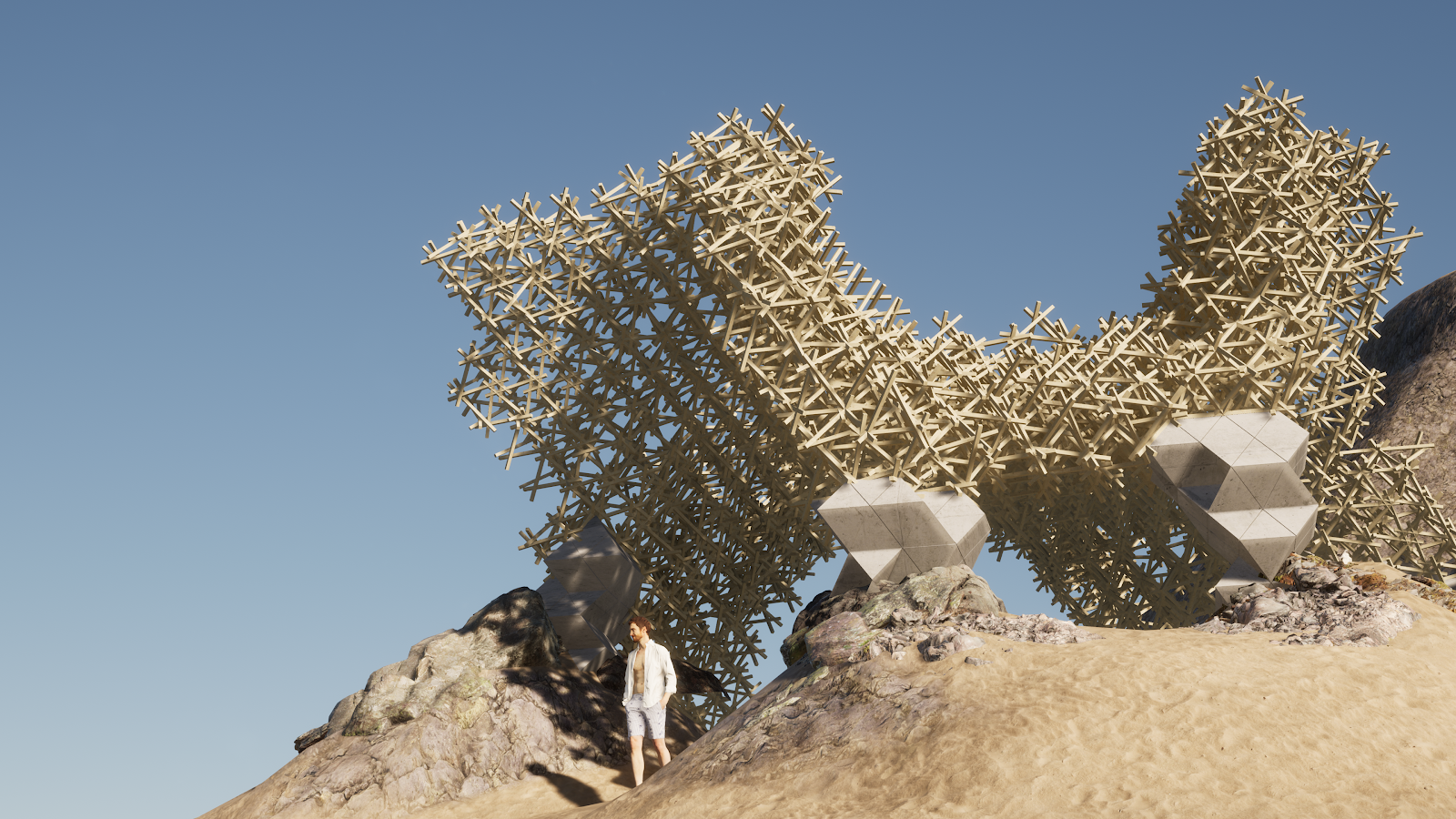
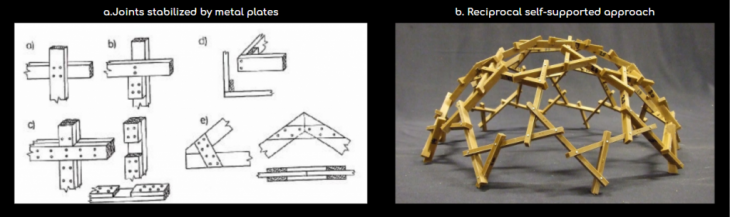
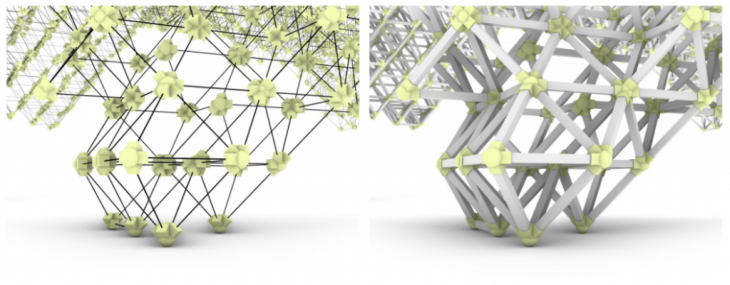
Final fabrication approaches
Final ideas for fabrication was to either use steel plates as way to join pieces or to use the self-supported approach. The element used were 5909 4 x 4 cm wooden planks, 50 cm length for regular grid and 70 cm for reciprocal approach. After analyzing the steel plates approach, it was changed to custom plug and play nest-joint system. This action was done to make the fabrication as simple and easy as possible. As the grid consists of the elements of the same length and is based on tetra and octa-hedrons it has a finite number of joint types, which can be prefabricated or 3d-printed.
Final renders